A robust real-time vision based GPS-denied navigation system of UAV
Abstract
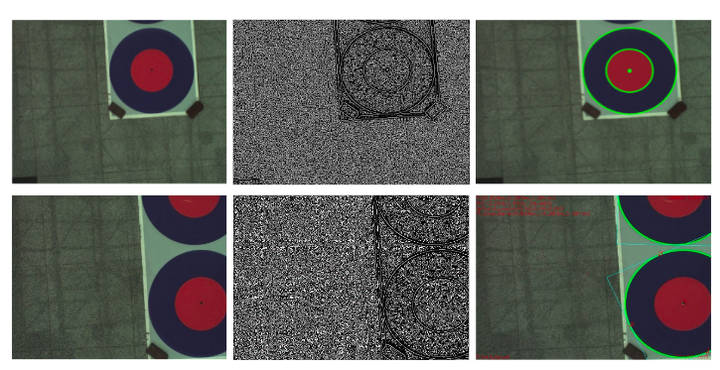
In 2015 International UAV Innovation Grand Prix the competition, the cargo transport task is assumed as that there are 4 buckets placed in four circles on one moving platform. Firstly, the unmanned aerial vehicle (UAV) is required to identify circle targets and the black and white id marker near the circle on one moving platform, then the UAV chosen a target bucket, tracked and transported it to the other moving platform, until all 4 buckets are transported from one moving platform to the other. In order to accomplish the cargo transport task, a method of a real-time vision-based GPS-denied multiple object tracking for UAV is developed. The Pixhawk controller is used to achieve tracking, that the relative distance and velocity between the target and UAV is estimated by the image. Finally, the experimental results proved the effectiveness and robustness of the algorithm.
Yu Zhou
Associate Scientist @Temasek Laboratories
My research interests lie in 3D visual perception and navigation, applied machine learning.