Decentralized robust exact tracking control for 2-DOF planar robot manipulator
Abstract
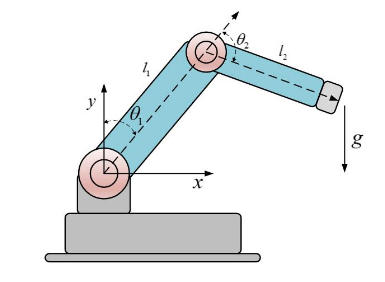
In this study, a novel decentralized exact tracking control approach for 2-DOF planar robot manipulators with disturbances and uncertainties has been proposed. The main idea of the proposed method is to partition the whole robot manipulator into single joint and lumped disturbance. A well designed extended high gain observer (EHGO) is adopted to observe the lumped disturbance of each joint, which includes coupling, load disturbance and uncertainty, etc. Rather than coping with the robot manipulator as a whole, the proposed method is locally designed to compensate the estimated coupling and stabilize the internal states of a single joint. By doing that, each joint can be virtually decoupled from the whole robot manipulator and functions in a relatively independent way. When joints are interconnected, the stabilization of the whole robot manipulator would be obtained by only guaranteeing the localized stability of individual joint. The theoretical analyses are rigorously conducted by utilizing Lyapunov stability theorem. Simulation results illustrate the effectiveness of the proposed control scheme.
Yu Zhou
Associate Scientist @Temasek Laboratories
My research interests lie in 3D visual perception and navigation, applied machine learning.