Visual Target Detection and Tracking Framework Using Deep Convolutional Neural Networks for Micro Aerial Vehicles
Abstract
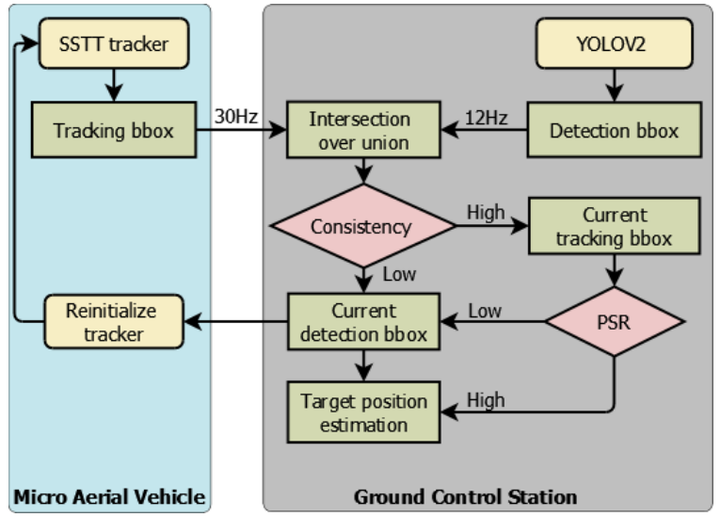
This paper presents a visual detection and tracking framework which estimates a smooth target position for various applications on micro aerial vehicles (MAVs). The proposed framework consists of two major components, a deep learning-based detector and a correlation filter-based tracker.The detector running at a low frequency first detects a targetand initializes the tracker. The estimated target position from the tracker will be updated by the detector when the detectionconfidence is high or the tracking is considered fail. Due to the limited computational power on most MAV platforms, algorithms are implemented at two separated processing units.The detector runs at a ground control station (GCS) equipped with NVIDIA GTX 1060 while the tracker runs at a MAVonboard low-cost CPU. The transmission of image and target pose information is bridged via a high-speed Wi-Fi network to minimize the latency. In our experiment, the proposed framework is able to realize real-time detection and tracking with 30 frames per second (FPS) on our system.
Yu Zhou
Associate Scientist @Temasek Laboratories
My research interests lie in 3D visual perception and navigation, applied machine learning.